


By Omar Yang (Senior Threat Researcher, Automotive)
超広帯域(UWB)技術は近年、注目を集めています。次世代のキーレス技術として称賛され、これまでの技術を悩ませてきた攻撃に対する耐性を約束しています。しかし、UWBは決して新しい技術ではありません。その起源は19世紀末にさかのぼり、ハインリヒ・ヘルツが火花放電送信機の実験を通じて最初のUWB信号を生成しました。UWB技術は20世紀中期から後期にかけて大きな進歩を遂げ、特に軍事用のレーダーシステムなどに応用されてきました。この豊かな歴史が、自動車のセキュリティに変革をもたらす現代のUWB応用への道を開きました。
2部構成のブログシリーズの第2回では、UWBの車両開錠システムへの統合、その利点、想定される脆弱性、そしてセキュリティ上の課題をどのように軽減するかについて検討します。
UWBプロトコルとは?
UWB(超広帯域)は、広い周波数スペクトルで動作する無線通信技術で、通常3.1〜10.6 GHzの範囲で使用されます。BluetoothやWi-Fiなどの従来の無線技術が狭帯域信号を使用するのに対し、UWBは広範囲の周波数でデータを送信します。この独特な特徴により、UWBは特に精度とセキュリティの面で際立った利点を提供します。
UWBは、広い周波数スペクトルにわたって短いパルスの電波を送信することで機能します。これらのパルスは正確なタイミングで送信され、受信機が各パルスの到達時間を正確に判断できるようになっています。時間差を計算することで、UWBはデバイス間の距離を高精度で測定できます。このため、UWBは正確な位置追跡と安全な通信が必要なアプリケーションに最適です。
ここでは、UWBの特徴をまとめます:
- 高精度: UWBはセンチメートル単位の精度で距離を測定できます。これは飛行時間(ToF)測定によって実現され、送信機から受信機まで信号が移動する時間を使って距離を計算します。
- 低干渉: 広い周波数範囲と低い電力スペクトル密度のため、UWBは他の無線技術からの干渉が最小限です。これにより、混雑した環境でも確実な通信が保証されます
- 高データレート: UWBは高速データ転送に対応し、迅速かつ大容量のデータ交換が必要なアプリケーションに適しています。
これらの利点により、UWBは様々な産業で多様な用途に使用されています。その用途をより理解するために、UWBが見られる産業とその活用方法をいくつか挙げます:
- 自動車産業: UWBは車両の開錠システムに統合され、セキュリティを向上させリレーアタックを防止します。正確な距離測定により、認証されたキーフォブやスマートフォンキーが特定の範囲内にある場合のみ車両のロックが解除されます。例として、AudiやBMWなどの車両における先進的なキーフォブやスマートフォンベースの開錠システムがあります。
- 家電製品: スマートフォンやスマートホームシステムなどのデバイスでは、正確な位置追跡やデバイス間の安全な通信にUWBが使用されます。顕著な例としては、Appleの「AirTag」があり、UWBを使用して紛失した物品の正確な位置追跡を提供し、ユーザーが持ち物を正確に見つけられるようにしています。
- 産業・医療分野: UWBは、資産や人員を高精度で追跡するリアルタイム位置システム(RTLS)や、医療画像診断・モニタリングアプリケーションに活用されています。
UWBの詳細
UWB技術は、BluetoothやWi-Fiなどの他の無線プロトコルでより一般的な正弦波ではなく、パルス信号を送信します。時間領域での短いパルス持続時間は、周波数領域で広い帯域にわたる電力スペクトルを意味します。UWBアプリケーションでは、パルス持続時間はナノ秒または数百ピコ秒で、それに対応する周波数を持ちます。例えば、2ナノ秒続くパルスは約500MHzの周波数帯域幅を持ちます。これは、信号が搬送周波数を中心に約500MHzの広がりを持つ広範囲の周波数を占めることを意味します。他の一般的な無線技術と比較して、UWBははるかに広い周波数帯を使用します。例えば、Wi-Fiは通常20〜160MHzを使用し、Bluetoothはわずか20MHzを使用します。
従来の狭帯域通信(例:2G携帯電話)や従来の通信(例:Wi-Fiや3G携帯)は、より狭い帯域でより高い電力レベルで動作します。一方、UWB無線通信は、大幅に低い送信電力で広い周波数範囲にわたって動作します。
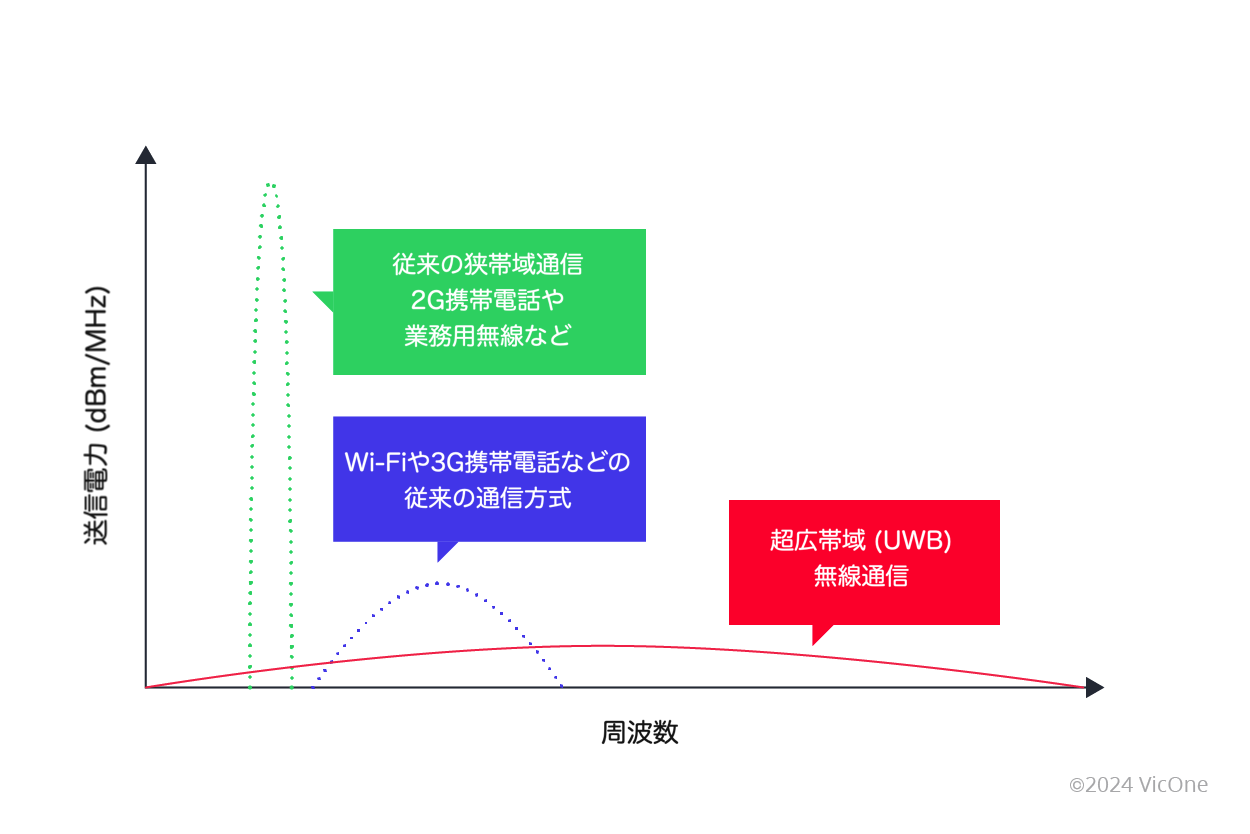
図1. 様々な無線通信技術における送信電力の比較
様々な測距と位置特定の方法
UWB技術は、物体の測距と位置特定のために複数の精密な方法を提供します:
- 飛行時間(ToF) は、送信機から受信機まで信号が移動するのにかかる時間を測定し、既知の信号速度に基づいて直接距離を計算します。この場合の信号は電磁波で、光速で移動します。
- 到達時間差(TDoA) は、複数の受信機を使用して同じ信号の到達時間の差を決定し、三角測量と高精度な位置特定を可能にします。
- 到達位相差(PDoA)または到来角(AoA) は、複数のアンテナを持つUWBデバイスを使用し、同じ信号を受信します。これによりアンテナ間で受信信号の位相差が生じます。この位相差を使用して送信機の相対的な位置と距離を計算します。
- 双方向測距(TWR) は、デバイス間で信号を交換し、往復時間を測定して距離を決定します。各方法は、UWBの高い時間分解能を活用して正確で信頼性の高い位置追跡を実現し、高精度を必要とするアプリケーションに適しています。これの変形として 両側TWR(DS-TWR) があり、TWRの2回ではなく少なくとも3回のメッセージ交換を行います。この方法では、アンカーとタグの両方が互いの距離を計算できるという利点があります。
以下の図では、異なる測距と位置特定の方法を使用してタグの位置を決定することが目的です。
ToFの場合、タグはUWBフレームをペイロードとして送信し、フレームが送信された時刻(t1)を記録します。アンカーはt2でフレームを受信し、ToFをt2 − t1として計算します。
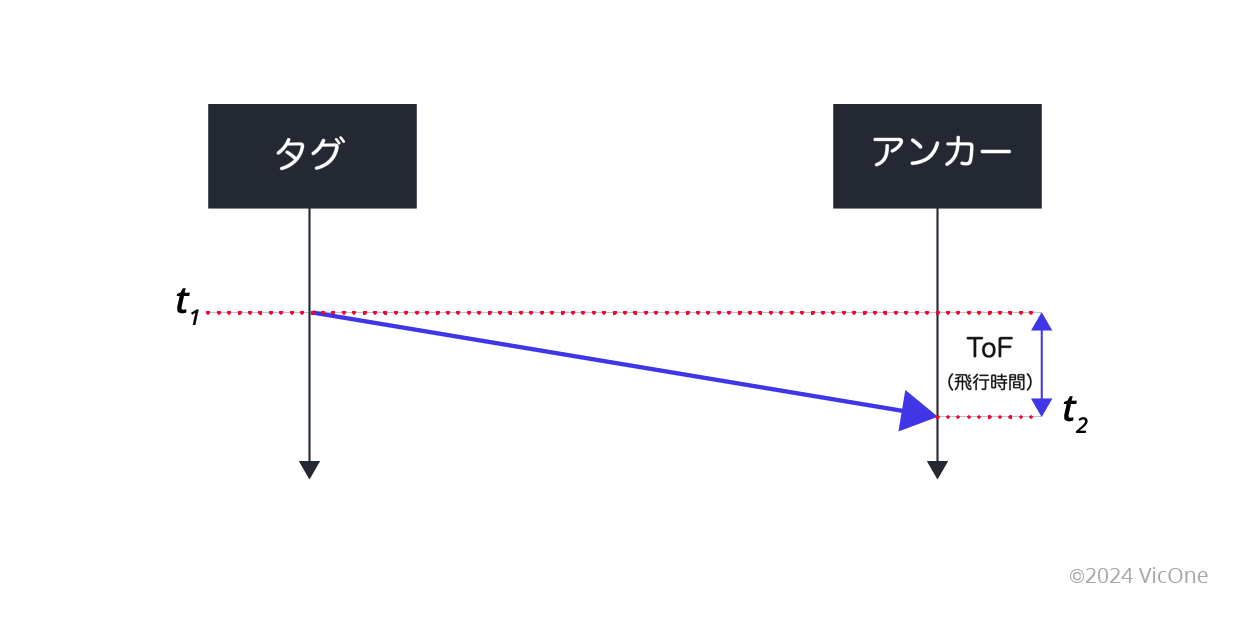
図2. タグの位置を計算するToF方法
TDoAの位置特定では、タグとアンカー間の距離が異なるため、タグが送信した信号は各アンカーに異なる時間で到達します。信号が各アンカーペアに到達する時間差を測定することで、双曲線が計算できます。タグの位置は、少なくとも3つのこのような双曲線の交点を見つけることで決定されます。
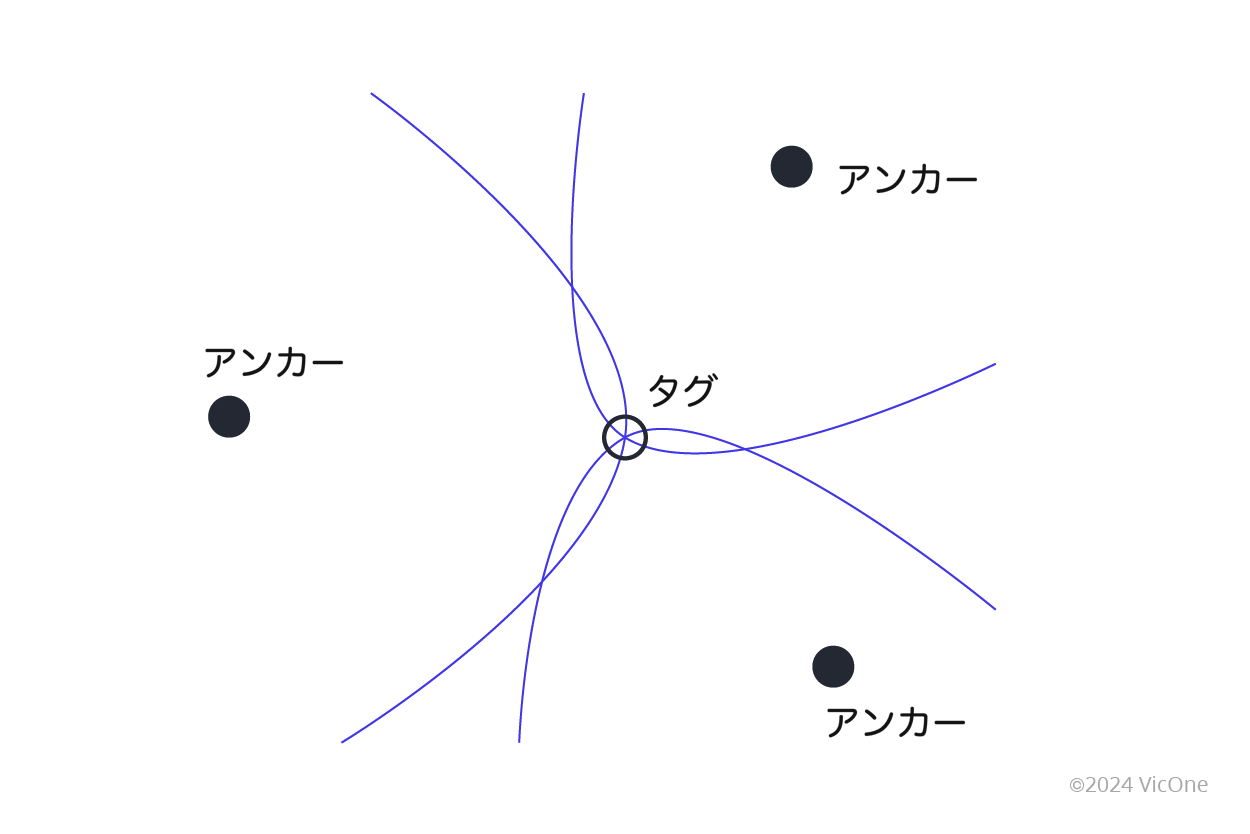
図3. タグの位置を決定するTDoA方法
PDoAまたはAoAの方法では、タグが送信した信号をアンカー上の複数のアンテナで受信します。異なるアンテナでの同じ信号の位相差を取得し、アンテナ間の距離を知ることで、タグの位置を正確に計算できます。
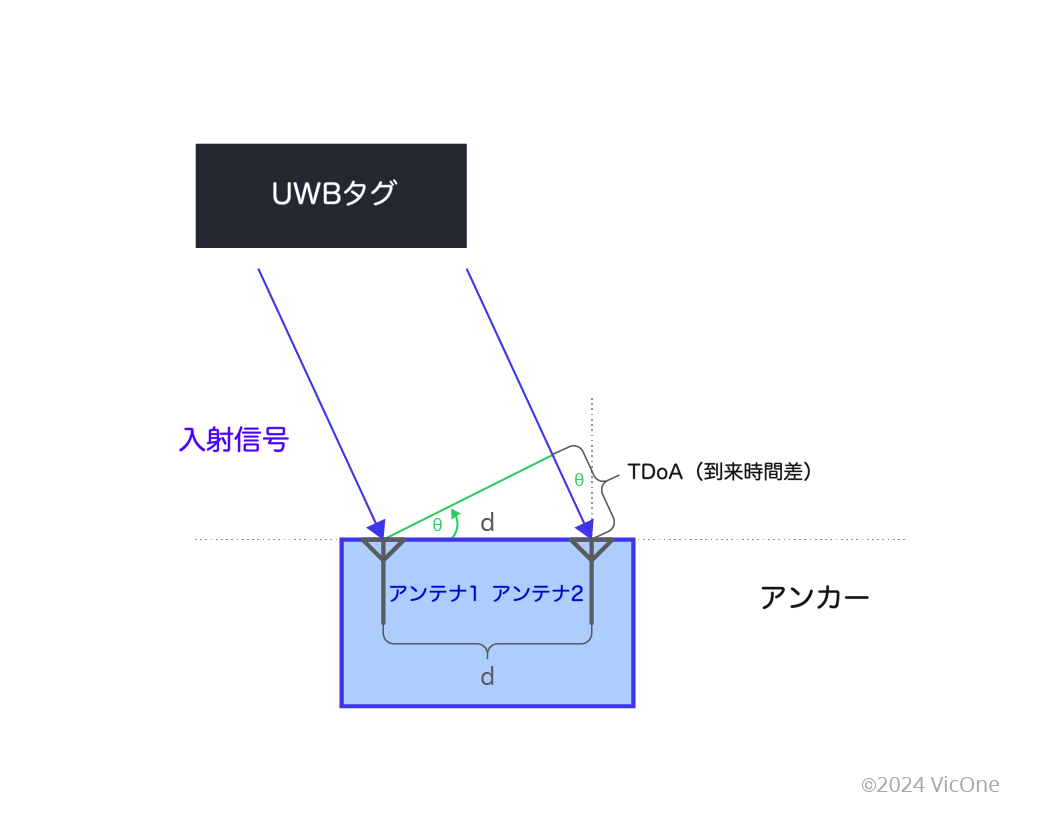
図4. タグの位置を計算するPDoAまたはAoA方法
TWRの方法は、アンカーとタグ間の同期が不要で、1つのデバイスのタイムスタンプのみに依存することで、ToF方法を改良しています。アンカーがメッセージを送信し、タグは伝播時間(ToF)後にそれを受信します。タグは固定の応答時間後に返信し、その時間をパケットに含めます。アンカーは既知の応答時間を使用して、往復時間(RTT)からToFを計算できます。
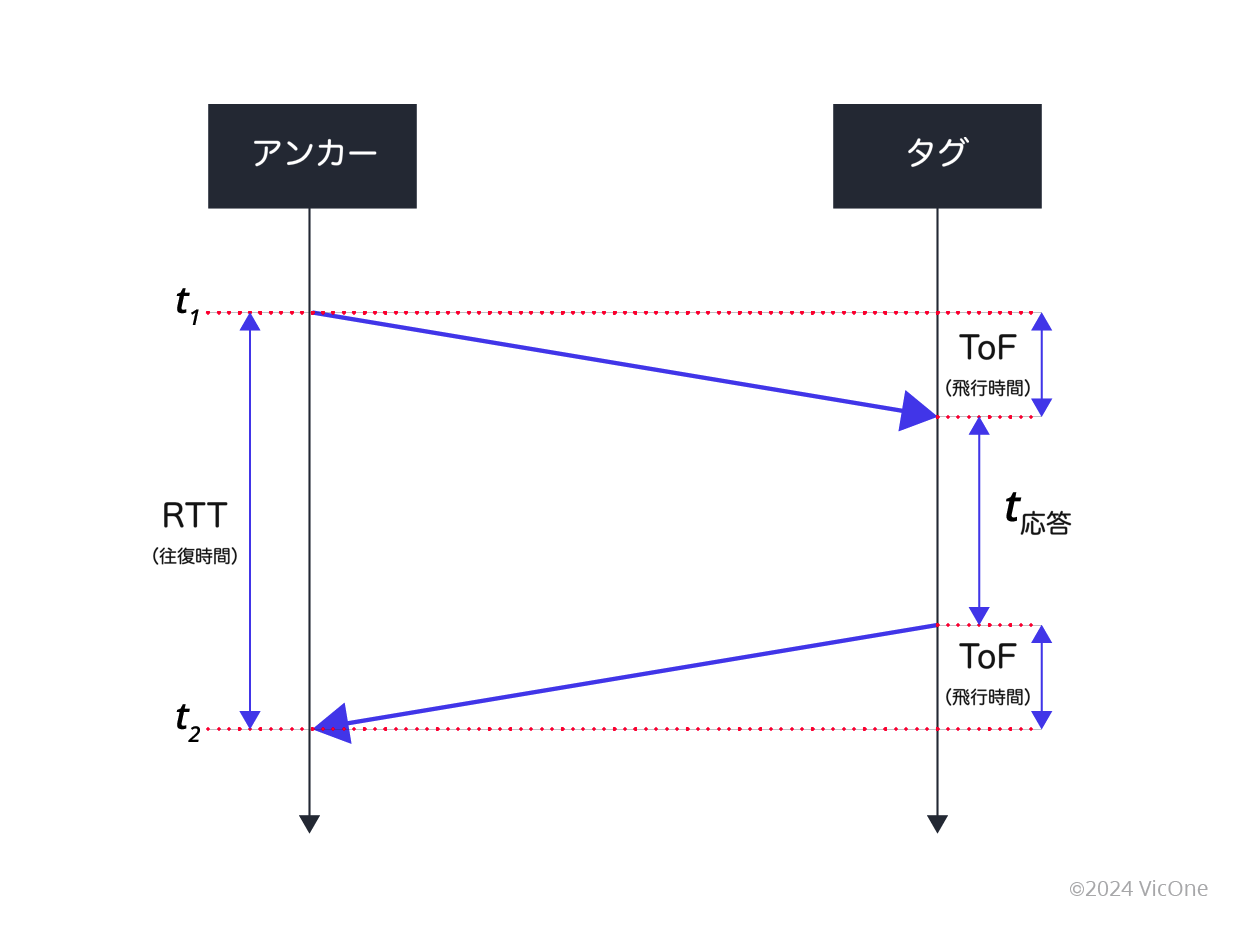
図5. タグの位置を計算するTWRの方法
DS-TWRの方法はTWRの方法に似ていますが、この場合、アンカーがタグに返信することで、タグがRTTを計算し、アンカーからの距離を決定できます。
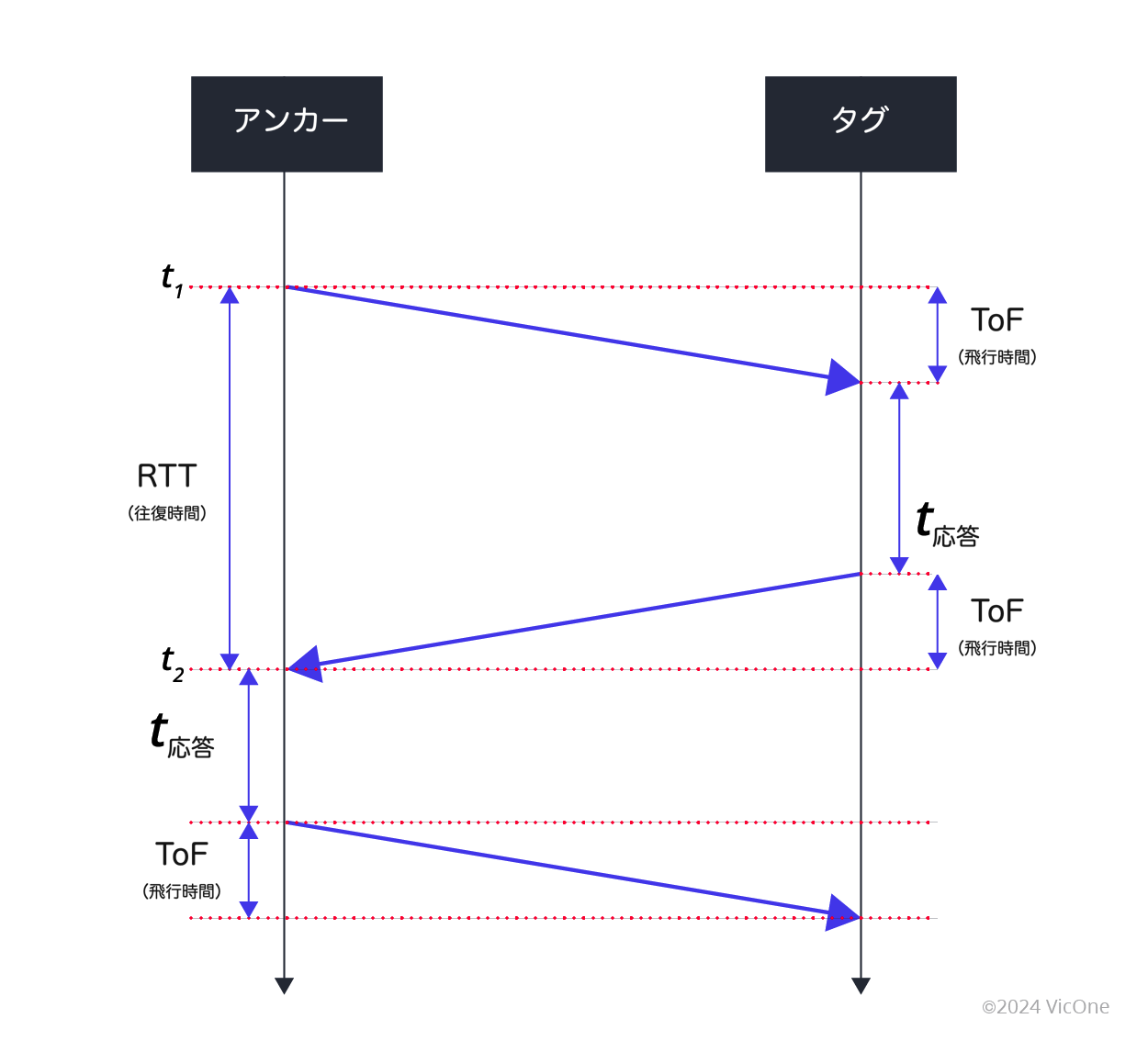
図6. タグの位置を計算するDS-TWR方法
なぜUWBがリレー攻撃に耐性があるのか
UWB技術がどのようにリレー攻撃を防ぐことができるかを説明するために、例を挙げます。このシナリオでは、車両とキーフォブの距離が1メートル未満の場合に車両のロックが解除できると仮定します。車両は盗難犯からキーフォブの信号をリレーしようとしている地点から5メートル離れて駐車されています。
1メートルからのアンロック時の飛行時間(ToF):
ToF1 m = 1/3 x 108 = 3.33 ナノ秒
5メートル離れた場所からの飛行時間:
ToF5 m = 5/3 x 108 = 16.67 ns1メートル以内で車両をアンロックするための閾値は約3.33ナノ秒ですが、信号が車両に到達するまでに16.67ナノ秒かかります。UWBシステムはこの差異を容易に検出できます。到達時間が閾値の約5倍長いため、キーが想定範囲内にないことを示しており、信号は拒否されます。
UWBに対する攻撃の可能性
UWBがリレー攻撃に耐性があるとすれば、他の形態の攻撃にも耐性があるのでしょうか?UWBが提供する機能にもかかわらず、UWB自体が完全に安全というわけではありません。
GoGoByteの研究者たちは、「UWB精密妨害」と呼ばれるUWBに対する攻撃を実証しました。彼らは、イニシエーターとレスポンダーの信号を記録し、予想される時間枠内に悪意のあるパケットを送信することで、メッセージの衝突を引き起こすことが可能かどうかを検証しました。実験では、iPhoneとAirTag間の測距機能を成功裏に妨害しました。イニシエーターを攻撃する際、攻撃デバイスはイニシエーターの近くに配置され、信号を盗聴します。適切なタイミングで偽のメッセージを送信することで、イニシエーターは意図されたレスポンダーからのメッセージを正しく解読できなくなります。
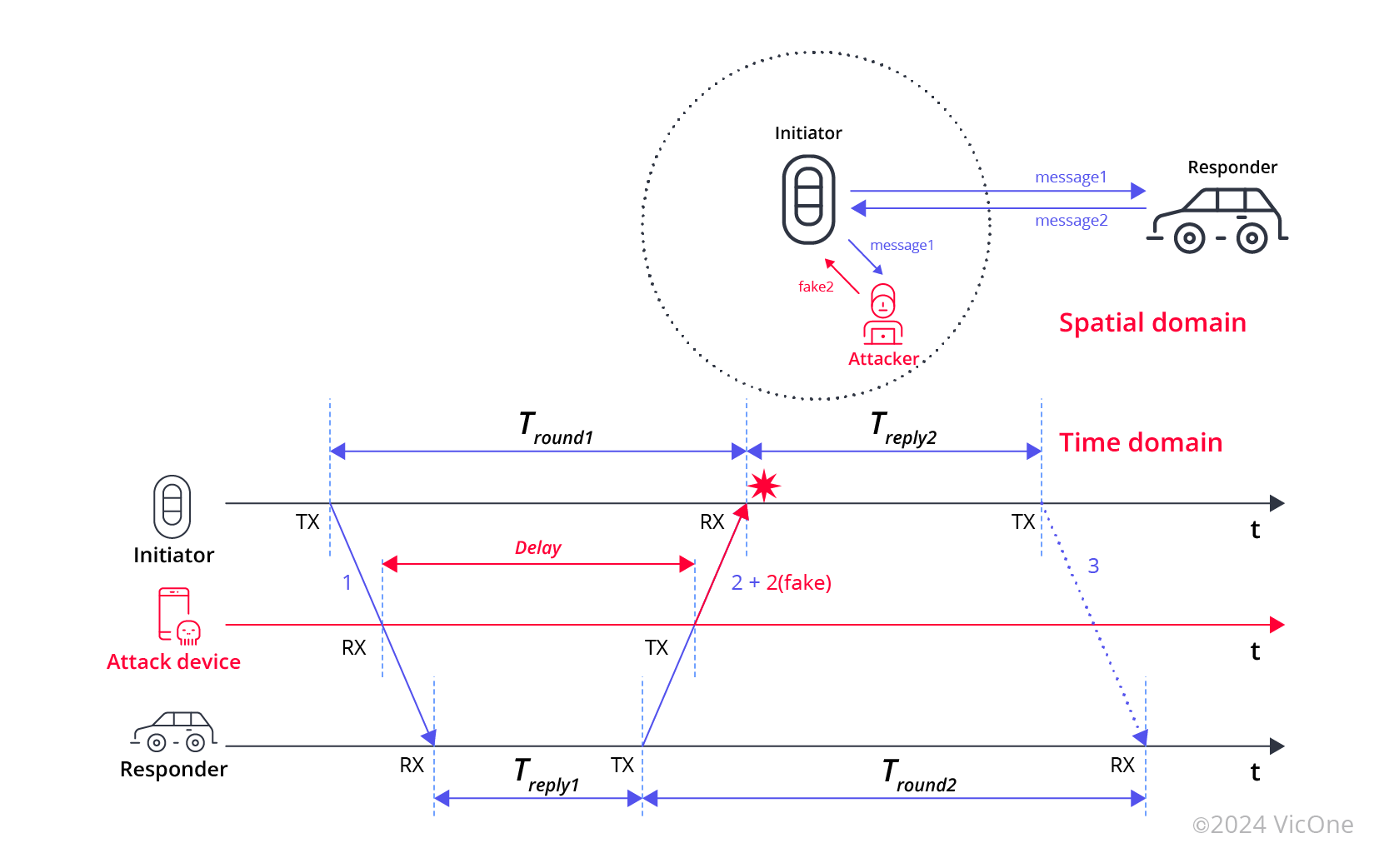
図7. 車両開錠システムに対するUWB精密妨害攻撃
このような攻撃は、パッシブキーレスエントリー・スタート(PKES)システムでUWBが必須とされている場合、車両の開錠システムにサービス拒否(DoS)を引き起こす可能性があります。しかし、車両のロック解除時にリアルタイムの測距が不要な場合や、PKESがUWBなしで実行可能な場合、車両盗難は依然として起こり得ます。
UWBを標的とした攻撃の軽減方法
UWB精密妨害のような攻撃が成功するのは、主にメッセージのタイミングが容易に予測できるためです。これらの攻撃を軽減するには、受信信号と送信信号の間にランダムな遅延を導入することができます。これにより、イニシエーターとレスポンダーのみが互いに本物のメッセージを期待でき、攻撃者が送信したメッセージは設計された時間枠外となり、無視されます。図8の図に示すように、応答時間が攻撃者にとって予測不可能であれば、攻撃者は本物のメッセージよりも早くまたは遅くメッセージを送信することになります。
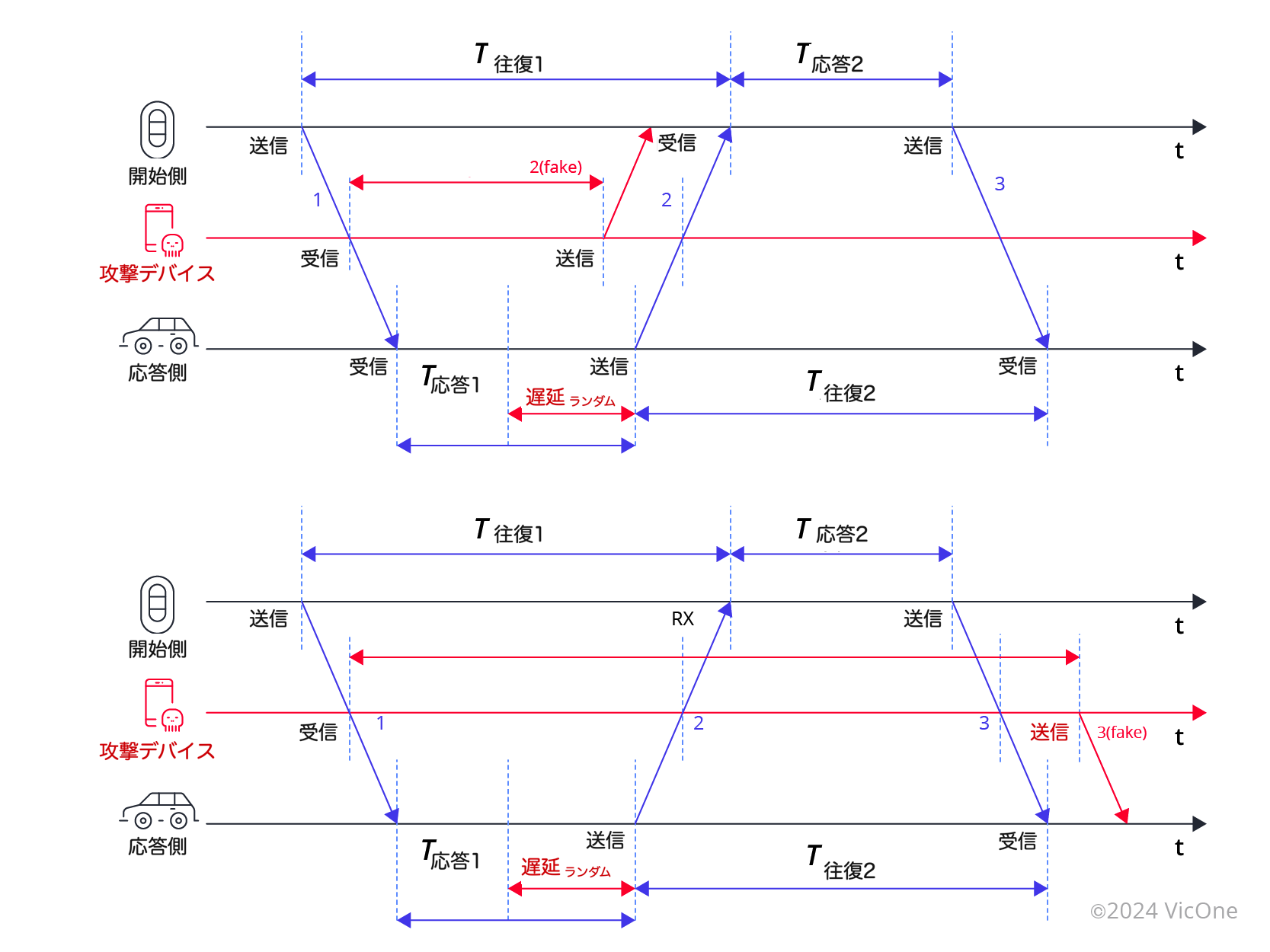
図8. UWBプロトコルへの攻撃を軽減するためのランダムな遅延の導入
前回のブログ記事では、UWBの使用に至るまでの自動車開錠システムの過去のバージョンを振り返りました。各バージョンは何らかの形の攻撃に対して脆弱でした。前回の記事と同様に、この第2回でも、UWB自体は車両盗難や他の形態の開錠システム攻撃に対する絶対的な防御ではないため、車両へのUWB実装においてセキュリティが重要な考慮事項であることを強調しています。