By Jerold Camacho, Auto Threat Researcher
The automotive instrument cluster is more than a display unit; it is a CAN-bus-connected ECU that depends on data from multiple vehicle systems to present speed, RPM, warnings, and status indicators. Because it directly reflects vehicle state to the driver, any manipulation or corruption of its CAN inputs can result in misleading or unsafe information being displayed.
Studying the instrument cluster in isolation provides insight into both functional dependencies and security assumptions embedded within in-vehicle networks.
How bench testing enables safe analysis of CAN-driven ECUs
Bench testing allows ECUs to be powered, observed, and stimulated without integration into a live vehicle. In this study, a Suzuki Wagon R MH55S instrument cluster was sourced and tested in a controlled environment, eliminating risks associated with on-vehicle experimentation while preserving real-world behavior.
The observations described here are not specific to Suzuki vehicles but reflect common trust assumptions found in many CAN-based automotive architectures.
This approach enables repeatable analysis of CAN traffic, message dependencies, and ECU responses under controlled conditions.
To safely operate the instrument cluster off-vehicle, a stable 12V power source with current limiting was used. CAN communication was provided through a USB-based CAN interface, enabling message injection and monitoring without additional vehicle ECUs present.
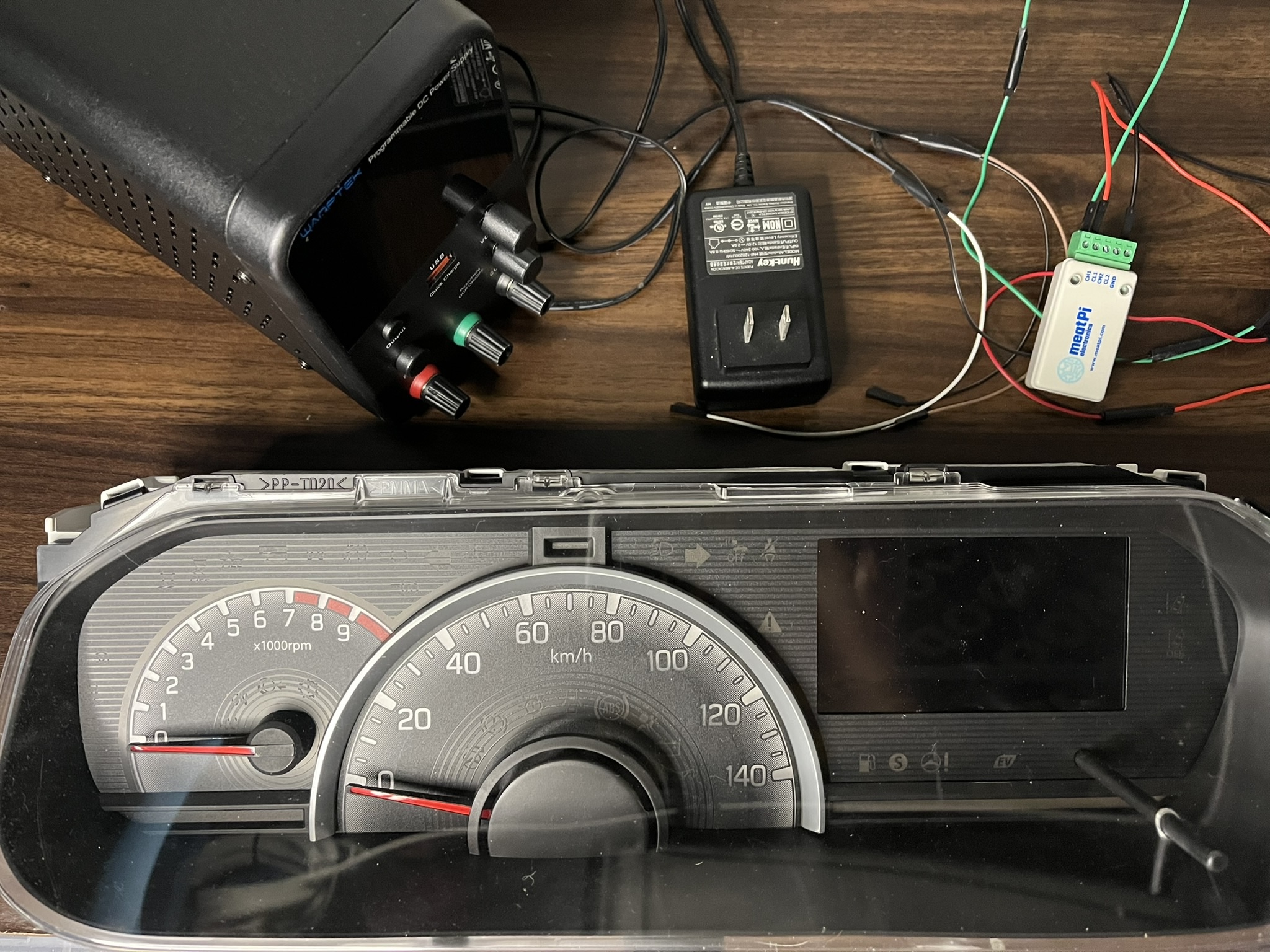
Figure 1. Tools and the instrument cluster. Clockwise from left: Wanptek adjustable power supply, 12v power adapter, meatPi USB Dual-CAN adapter, and Suzuki Wagon R MH55S
Careful control of power and signaling is essential to prevent hardware damage and to ensure observed behavior results solely from CAN input.
Before CAN traffic was introduced, power, ground, and CAN-H/CAN-L pins were identified using a multimeter. Each connection was validated prior to powering the cluster to ensure correct polarity and signal integrity.
Once powered, the cluster reliably entered an operational state and began responding to CAN messages, confirming correct pin identification.
Validated Connections
- 12V Supply (VCC): Pin #15
- Ground (GND): Pin #3
- CAN-H / CAN-L: Pins #8 and #20
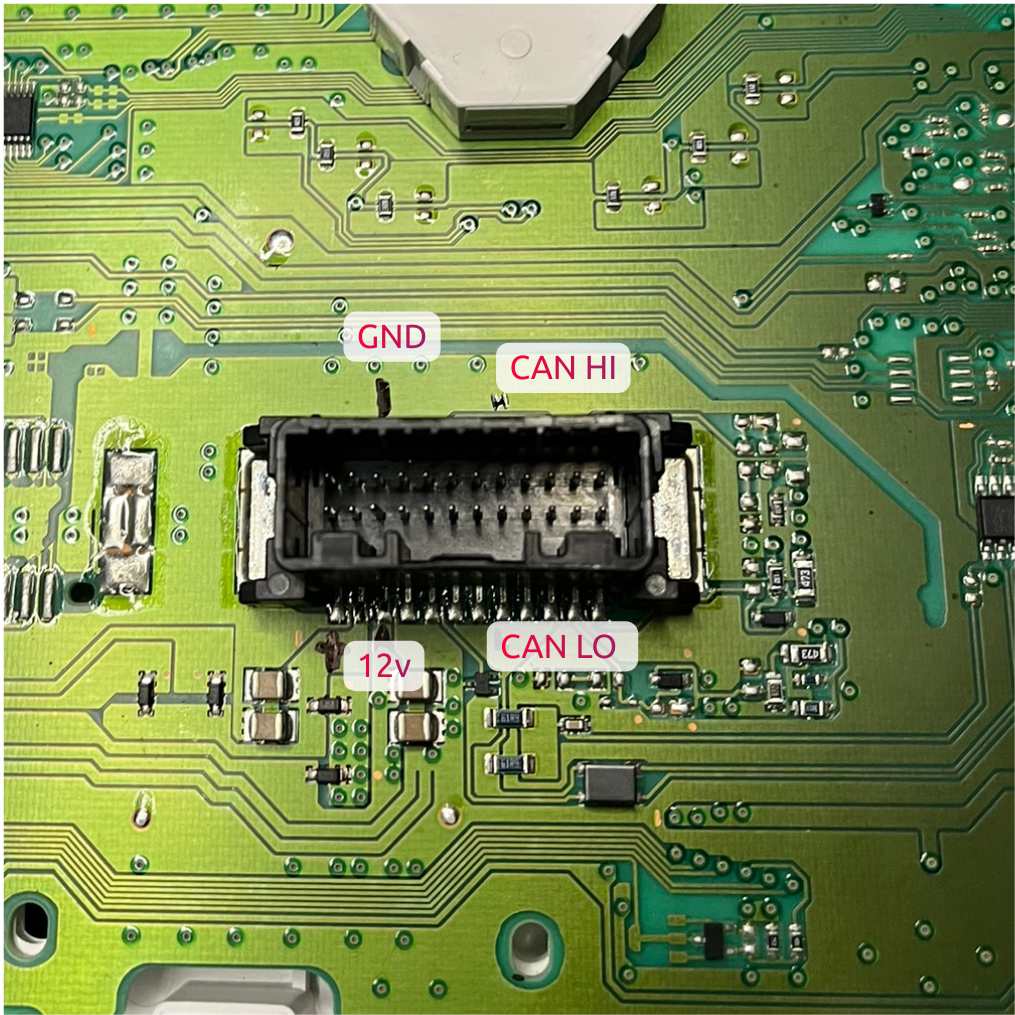
Figure 2. Suzuki Wagon R MH55S cluster pinouts needed (12V, GND, CANH, CANL)
Why CAN fuzzing is effective against trust-based networks
The CAN protocol does not include authentication, integrity checking, or sender verification. As a result, ECUs typically trust any correctly formatted message placed on the bus.
CAN fuzzing exploits this trust model by injecting randomized or malformed frames to observe unexpected ECU behavior, making it an effective technique for identifying message-driven functionality and potential security weaknesses.
How CAN frame injection reveals and isolates instrument cluster behaviors
Using the automotive security tool caringcaribou, randomized CAN frames were injected into the powered instrument cluster. This caused observable behaviors including warning sounds, indicator activation, RPM changes, and display updates.
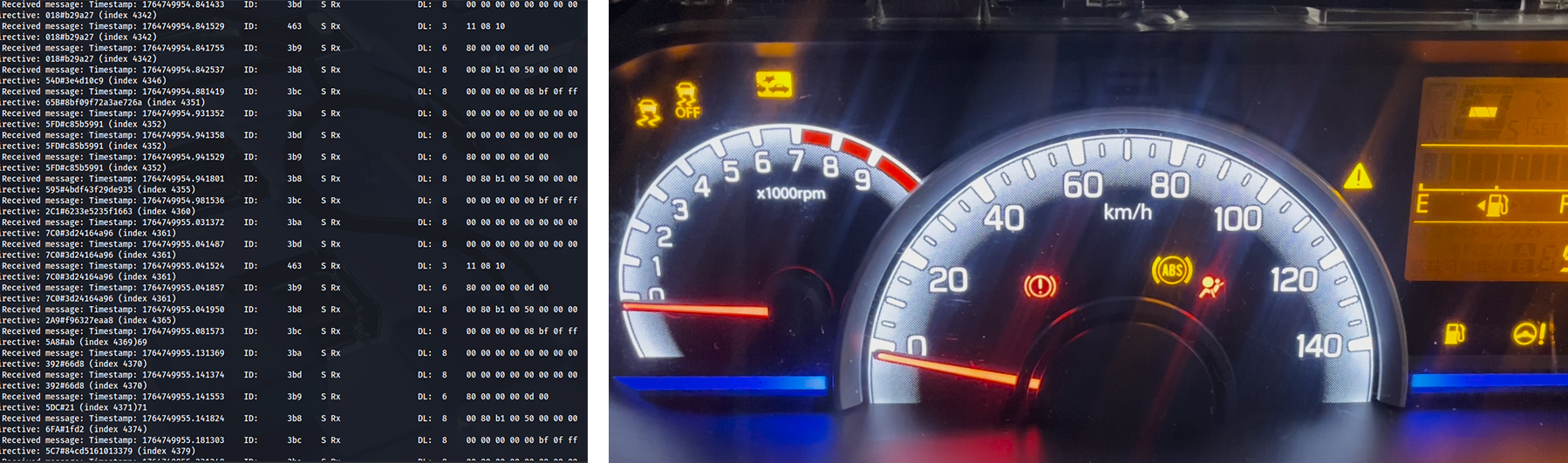
Figure 3. Injecting randomized CAN frames to identify logic gaps.
These reactions demonstrate that the cluster processes unauthenticated messages without contextual validation of source or vehicle state.
Captured CAN traffic from the fuzzing session was analyzed to identify messages responsible for specific behaviors. By correlating injected frames with observed RPM changes, a CAN frame controlling engine speed indication was isolated.
The identified frame could then be replayed to consistently reproduce RPM changes on the cluster, confirming message-to-function mapping.

Figure 4. False indicators triggered solely via software injection, creating a hazardous distraction scenario.
Why trust-based CAN communication creates risk and how testing informs mitigation
The ability to induce meaningful ECU behavior through arbitrary CAN message injection exposes a structural weakness in CAN-based vehicle networks. Because many ECUs still rely on legacy trust assumptions—accepting correctly formatted messages without verifying origin or intent—unauthorized network access can allow injected messages to disrupt ECU coordination or present false information to the driver, even in vehicles equipped with modern gateways and filtering mechanisms.
Bench-level ECU testing provides a safe and effective way to move this risk from theory to evidence. By observing ECU behavior in isolation and under controlled CAN message injection, testing reveals how easily trust boundaries can be crossed and how legitimate-looking traffic can trigger unintended outcomes. These insights are difficult to obtain through on-vehicle testing alone and are critical for understanding real-world security limitations.
Effective mitigation strategies are most successful when grounded in these observations. Replacing implicit trust with a zero trust communication model enables ECUs to validatemessage authenticity and context rather than accepting CAN traffic by default. At the network level, gateway-based anomaly detection can identify deviations in command sequences, timing, or frequency, and feed these signals into structured risk assessment processes such as TARA. Together, these measures allow OEMs to distinguish credible threats from benign anomalies and to apply mitigations across both current vehicle lifecycles and future platform designs.